

自动驾驶技术的开山鼻祖--美国ALV计划
2016年08月26日 13:53
来源:凤凰军事
作者:刘晓峰

最近,无人驾驶车辆技术的热度很高,其中以美国谷歌公司提出的无人车方案广受大家关注。无人驾驶分为两种,一种是车内无人,但遥控驾驶;另一种是自主驾驶。从过去十几年的科技进步来看,很多看似不可能的技术现在已
资料图
最近,无人驾驶车辆技术的热度很高,其中以美国谷歌公司提出的无人车方案广受大家关注。无人驾驶分为两种,一种是车内无人,但遥控驾驶;另一种是自主驾驶。从过去十几年的科技进步来看,很多看似不可能的技术现在已经变得寻常,似乎自主驾驶但车辆在不久的将来也能进入我们的生活。现在一些高档汽车上有自动泊车、自动纠偏功能,这离自动驾驶还有多远?就连军用的装甲车和坦克也被认为实现了无人化、自主驾驶是未来的发展趋势。然而真的是这样么?今天我们先不谈军用车辆自主驾驶和无人化可行与否,只透过自主驾驶车辆的鼻祖,看看美国ALV无人车当年是怎么起步的。
美国军用机器人的研制工作早在上世纪80年代就已经开始了,但是当时研制的并不是具有实战价值的军用机器人,而是一种自主地面车辆。1983年,由美国国防部预研规划局出资的"战略计算机"计划正式启动,具体的研制任务交由陆军工程兵局地形实验室来完成。而自主式地面车辆计划仅仅作为"战略计算机"计划的一个组成部分。那一年我们国家常规兵器工业正在进行WZ551轮式装甲车的技术论证试验。当时美国考虑的是如何让机器代替人进行危险的工作;而我国陆军考虑的则是如何把作战人员快速投入战场,至于军用机器人的事情在我国基本上没有人会去提及。从这一点,就透视出了两个国家的作战理念存在着隔代的差距。直到1986年国家正式启动"863"计划,我国的军用机器人研制工作才被提上日程。
资料图
在1983~1988年之间,美国无人地面无人平台的研究特点是全面铺开,各自为战。在研制初期,军方对于军用地面无人平台的发展前景表现得十分乐观,在当年陆军委员会的报告中就明确地提出:"21世纪的核心武器是自主地面车辆(ALV)"。自主地面车辆(ALV)计划在1984年获得美国国防部的拨款。根据计划,国防部将出资一亿零六百万美元来支持这个项目,后来由于受到通货膨胀的影响,这个数字被追加到两亿四千万美元。然而,就算对于科研实力世界领先的美国而言,在80年代研制一款自主地面车辆也并不是一件容易的事,由于受到当时很多关键技术的限制,美国自主地面车辆的研制工作进展十分缓慢。
资料图
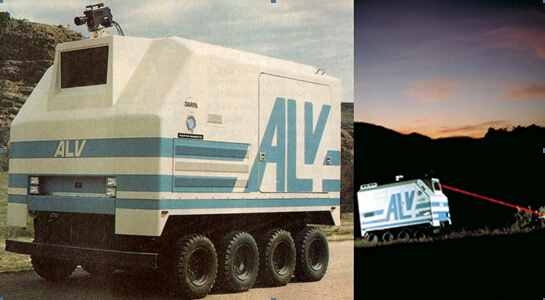
1985年,美国自主地面车辆首辆样车在丹佛西南部的一个秘密工厂被研制出来,经过试验发现,ALV的图像处理和计算机技术其实并不能够满足军用无人地面平台的使用需求,因为当时想要处理图像的话只能借助于中型或大型计算机。所以我们从照片中看到ALV样车的体积十分庞大,全车高3.05米、重6.8吨。ALV的视觉系统也并不十分先进,就是一台民用电视摄像机。但与其说是摄像机,倒不如说是一台像素很低的数码照相机,因为它并不是连续摄像,而是每隔2.4秒取景一次,方向也是固定的,摄像机通过一根暴露在外部的数据线把拍摄到的画面传给车上的计算机进行分析处理,再由计算机控制底盘完成行走动作。这种类似眨着眼睛走路的视觉系统和运算能力很有限的计算机就给整个车辆的机动性能造成了很大障碍,再加上研究人员低估了自主地面车辆行进时所需要的信息处理量和软件系统的复杂程度,使得ALV眼睛看不清、脑子反应慢,机动性能并不理想,最终ALV样车只能以4.8千米/小时的速度沿平坦道路自主行驶0.96千米。就在一切研制工作缓慢进行的时候,1988年4月,美国国防部高级研究计划局正式取消了ALV项目,1989年美国国会削减了对陆军新型装备的研制经费,1990年自主地面车辆计划宣告结束。据当当年参与过ALV项目的科研人员回忆:"我们在四四方方的白色车体上刷上了'ALV'的字样,的正前方有一个窗口,类似汽车的挡风玻璃,我们没有给这个大家伙任何指令,我们当时在场的所有人只听见车载柴油机发出的轰鸣声,默默地在边上看着这个大家伙车在一条狭窄的道路上沿着中心线安详地慢慢向前爬行。这个笨重的家伙往前行驶了约半英里就停下了,虽然ALV的性能是那样的不尽人意,但是我们仍然很兴奋,因为我们开创了一个只依靠视频、激光和电脑行进而不依靠人工干预的智能车辆。"由此可鉴,虽然美国现代军用机器人的第一次研制工作落得一个虎头蛇尾的结局,最终并没有被军队选用,只造出了一辆表演样车用于演示自主地面车辆的导航技术。但是从当时在场的科研人留下的回忆当中,我们可以看到ALV项目确实具有它进步的一面。

资料图
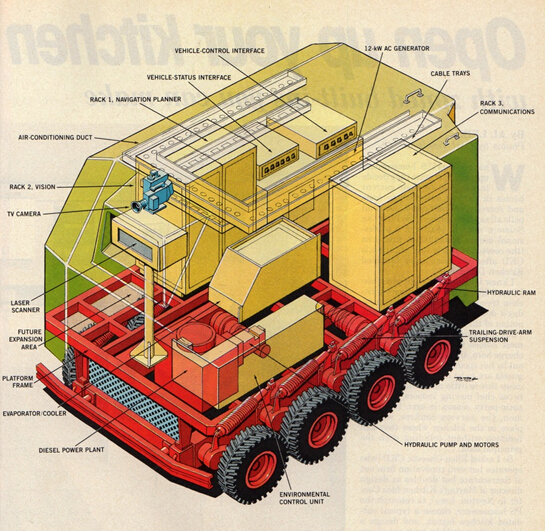
ALV的设计思路一直影响着美国陆军后来对于自主地面车辆和其它无人地面平台的研制。ALV的很多失败的经验都在后来的自主地面车辆上进行了改进。ALV奠定了未来自主地面车辆将主要分为视觉系统、导航系统和行进底盘三个部分。美国科研人员通过ALV的行进测试发现,自主地面车辆在行进的时候,认为ALV的机动性能不理想,视觉系统的缺陷是最大的问题。原来选用的电视摄像机很容易受到地面阴影的干扰和迷惑,经常对路面进行误判。所以科研人员只能在中午进行测试。而且观测周围战场环境仅仅依靠一个电视摄像机是不够的,捕获目标和必须由一套完整的视觉系统来完成,应用在战场上的视觉系统必须能获得目标的位置、大小和属性信息,并确定一个3维地形图。要实现这个目标,最关键的部分是传感器的研制。美国的科学家后来基于ALV的图像获取组件的失败教训,研制了一种多频谱3维扫描器,和一套全新的导航系统。新的导航系统不再是单独依靠摄像机画面看着地走路,而是"跟着感觉走",传感器获得外部环境目标的信息以后,由导航系统决定怎么走,因为自主地面车辆的速度和任务目标极为复杂,所以装配在自主地面车辆上的新型导航仪将由一套计划装置、一套制图装置和一套驾驶仪组成。行进部分除了原有的轮式底盘外,又新开发了履带式车辆底盘和仿生多足行进机构等设计方案。尽管美国第一次由计算机控制的地面无人平台研制计划雄心勃勃地来,最后静悄悄地走了,没有达到预期的研制目的,但是却为后来的无人地面平台研制打下了良好的基础,也积累了不少经验。

[责任编辑:张岩松 PN020]
责任编辑:张岩松 PN020
- 笑抽

- 泪奔

- 惊呆

- 无聊

- 气炸










频道推荐

凤凰军事官方微信
视频
-

李咏珍贵私人照曝光:24岁结婚照甜蜜青涩
播放数:145391
-

金庸去世享年94岁,三版“小龙女”李若彤刘亦菲陈妍希悼念
播放数:3277
-

章泽天棒球写真旧照曝光 穿清华校服肤白貌美嫩出水
播放数:143449
-

老年痴呆男子走失10天 在离家1公里工地与工人同住
播放数:165128










